Payload
WIVERN instrument specifics
The WIVERN payload is a single instrument: a W-band Doppler radar that adopt polarization diversity with a radiometric mode. The specifics of the radar systems are summarized in the Table.
|
Parameter
|
Value
|
Comment
|
|---|---|---|
|
Altitude
|
500-535 km
|
SSO 15+1/5 considered
|
|
Transmit frequency
|
94.05 GHz
|
Same as CloudSat and EarthCARE
|
|
RF signal type
|
Pulsed tone
|
Same as CloudSat and EarthCARE
|
|
Transmitted RF pulse duration
|
3.33 µs
|
Optimisation wrt vert. res. and Za0dB to be conducted in phase 0
|
|
RF duty cycle
|
~1.3 %
|
Per Transmit channel
|
|
Transmit RF peak power
|
1.7 kW (EoL)
|
EarthCARE EIK – Per Transmit channel
|
|
Pulse pair Repetition frequency
|
~ 4 kHz
|
Variable along the orbit
|
|
Dual pulse interval
|
20 µs
|
Geometric correlation ~ 0.98 + 40 m/s unambiguous velocity range
|
|
Transmit polarisation
|
H and V
| |
|
Tx-Rx polarisation
|
HH, VV, VH
|
VH for LDR mode (Tx in H - Rx in H and V)
|
|
Off-Nadir pointing
|
38°
|
Incidence 41.6° on-ground (41.4° ToA)
|
|
Conical scan rate
|
12 RPM
|
footprint speed ~500 km/s
|
|
Main antenna aperture
|
3 m x 3 m
|
Compatible with VEGA-E fairing
|
|
Antenna 3dB IFOV (1-way)
|
0.071°
|
From simulation
|
|
Antenna gain
|
67.7 dBi
|
From simulation (including reflectors losses and uncertainties)
|
|
Cross-polarisation
|
-30 dB
|
Objective to isolate HH and VV echoes from cross-pol echoes.
|
|
Receiver Noise Figure
|
3.5 dB
|
LNA box input port
|
|
Transmit/receive path loss
|
5 dB
|
To be optimised during study phases (design trade-off)
|
|
System margin
|
3 dB
|
Included in single pulse sensitivity (cloud and surface)
|
|
Vertical/Horizontal resolution
|
650/690 m
|
For 3.33 µs transmitted pulse
|
|
Single pulse sensitivity (cloud)
|
-15 dBZ
| -21 dBZ EarthCare |
|
Single pulse sensitivity (surface)
|
-45 dB
|
Attenuated surface sigma0 equivalent to thermal noise
|
|
Doppler measurement noise
|
2 m/s on ULoS
|
20-km integration along scan – Z=-15 dBZ (incl. 3-dB margin)
|
|
Radiometer mode resolution
|
3-4 K
|
Integrated over 500 MHz and 6 PRIs (~1 km scan)
|
|
Radiometer mode stability
|
0.1 K
|
Receiver gain variations over 100 km scan
|
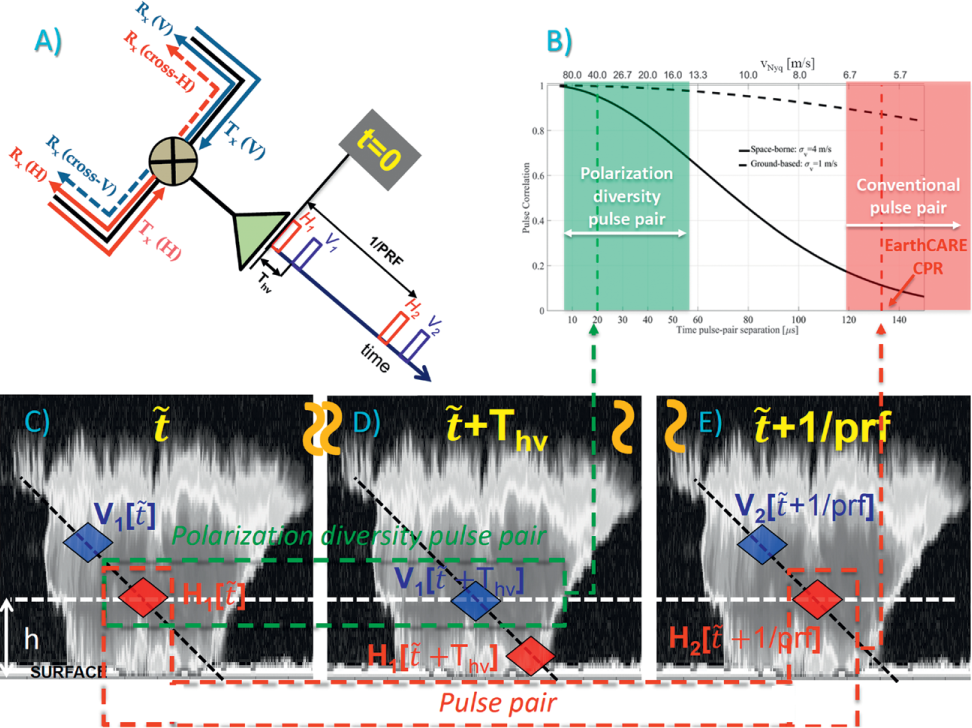
WHY POLARIZATION DIVERSITY?
The simple answer to the question “why polarization diversity” is that at 94 GHz we need to have two pulses that are very close together because the motion of the satellite combined with the finite beamwidth of the radar results in a rapid decorrelation of the phases of the return signals. If the pulses are close together, they would both be in the cloud at the same time: to distinguish them, WIVERN transmits pairs of pulses with alternating polarization—H (red) and V (blue)—spaced by a short time separation, Thv, and receives the return signals in both polarizations (see Panel A). Because of the orthogonality of the polarizations, the horizontally and vertically polarized pulses are transmitted and backscattered, and then propagate through the atmosphere independently so that the returns from the two closely spaced pulses can be separated.
Cross-polar interferences are typically weak and WIVERN signal processing includes ways for removing their effects.
In Panel C, the red H pulse is at height h, and at a short time later (e.g.,Thv = 20 μs), the blue V pulse has moved (e.g., 3 km) along the slant path and is at height h (Panel D). The estimation of the Doppler velocity is based on the phase change between the back-scattered signals of these two pulses. Panel B (green-shaded region) shows that for a Thv of only 20 μs the targets have not had time to reshuffle, so the phases remain correlated and can be measured accurately. The maximum unambiguous phase shift value of ±180° is reached when the cloud particle targets move one quarter of a wavelength (800 μm at W band), equivalent, with Thv = 20 μs, to a folding velocity of ±40 m s−1 (top x axis in Panel B). Contrast this with the situation encountered in a conventional pulse pair (Panel E) when the phase change is derived between two pulses with the same polarization, with the second red H pulse trailing 130 μs (≈20 km) behind the first so that only one pulse at a time is in the troposphere. Because of the fast movement of the satellite, the targets would appear to have been almost completely reshuffled (red- shaded region in Panel B), the phase difference would be very noisy, and the maximum “folding” velocity only about 6 m s−1, far below that required for retrieving line-of-sight winds.